现在自动驾驶靠不靠谱,特斯拉再出车祸,而且是在国外!不靠谱的自动驾驶为什么不禁止
潜江龙资讯网
目前还没有任何一个国家允许完全自动驾驶汽车随便上路。中国只有特批部分车辆在特定路段以特定速度行驶。比如天津有两个园区的公交车已经实现完全自动驾驶现在自动驾驶靠不靠谱,并且安全行驶一年以上。
 学术界所说的自动驾驶,与民众所理解的自动驾驶完全是两回事。
学术界将人为操作以外的任何由电脑芯片完成的任何工作,都称为自动驾驶技术,所以国际上通用的标准是将自动驾驶技术分为L0~L5六级(详见我的图文原创《汽车自动驾驶与自动辅助驾驶技术分级标准》)只有L5级才是完全由电脑控制汽车行走,车上乘员只是乘客。也只有L5级,才是普通民众认为的自动驾驶。目前,世界上还没有任何一款达到商用水平的L5级自动驾驶汽车。自称自动驾驶技术领先的特斯拉,不过勉强达到L2级别。正在验证阶段的华为自动驾驶系统据说可以达到L4级别,但还没有量产车正式交付。
按照中国人的习惯,L4以下级别的自动驾驶汽车,我们都叫做自动辅助驾驶系统。目前国内销售的不少高配汽车,辅助驾驶系统已经达到L2级别,个别豪华品牌已经达到L3级别(配备全速自适应巡航、全速自动刹车及碰撞预警、车道保持、轻微转向功能)。
L3级别的自动驾驶技术,虽然可以实现特定情况下的自动驾驶,但仍然需要驾驶员随时准备结果车辆,否则就可能发生事故,甚至车毁人亡。
特斯拉的自动驾驶技术只达到L2级别,完全不具备靠行车电脑控制车辆行驶的能力。出现交通事故的,多数是由于司机没有按照说明书操作。
另外,特斯拉可能存在偶发性刹车异常、幽灵加速、幽灵刹车、等故障,可能的原因有两个方面:一是软件存在不稳定性,一是环境感知系统存在缺陷,不能准确提供环境模型。
特斯拉预防碰撞系统及车道保持系统还可能存在逻辑错误,需要专业人士分析、论证。
自动驾驶,从来就没有安全过!
学术界所说的自动驾驶,与民众所理解的自动驾驶完全是两回事。
学术界将人为操作以外的任何由电脑芯片完成的任何工作,都称为自动驾驶技术,所以国际上通用的标准是将自动驾驶技术分为L0~L5六级(详见我的图文原创《汽车自动驾驶与自动辅助驾驶技术分级标准》)只有L5级才是完全由电脑控制汽车行走,车上乘员只是乘客。也只有L5级,才是普通民众认为的自动驾驶。目前,世界上还没有任何一款达到商用水平的L5级自动驾驶汽车。自称自动驾驶技术领先的特斯拉,不过勉强达到L2级别。正在验证阶段的华为自动驾驶系统据说可以达到L4级别,但还没有量产车正式交付。
按照中国人的习惯,L4以下级别的自动驾驶汽车,我们都叫做自动辅助驾驶系统。目前国内销售的不少高配汽车,辅助驾驶系统已经达到L2级别,个别豪华品牌已经达到L3级别(配备全速自适应巡航、全速自动刹车及碰撞预警、车道保持、轻微转向功能)。
L3级别的自动驾驶技术,虽然可以实现特定情况下的自动驾驶,但仍然需要驾驶员随时准备结果车辆,否则就可能发生事故,甚至车毁人亡。
特斯拉的自动驾驶技术只达到L2级别,完全不具备靠行车电脑控制车辆行驶的能力。出现交通事故的,多数是由于司机没有按照说明书操作。
另外,特斯拉可能存在偶发性刹车异常、幽灵加速、幽灵刹车、等故障,可能的原因有两个方面:一是软件存在不稳定性,一是环境感知系统存在缺陷,不能准确提供环境模型。
特斯拉预防碰撞系统及车道保持系统还可能存在逻辑错误,需要专业人士分析、论证。
自动驾驶,从来就没有安全过!
 在未来,想要实现安全,也很难!到底有多不安全,我给你详细扒一扒:千万别以为这是高科技,高是很高,但是空中楼阁,地基不稳,所以现阶段再眼花缭乱的功能,都只是看上去很美,用起来很废。不了解这一点,自动驾驶千万别乱用,对于车辆来说只是一个bug,对于你来说是一生,是一个家庭!
在未来,想要实现安全,也很难!到底有多不安全,我给你详细扒一扒:千万别以为这是高科技,高是很高,但是空中楼阁,地基不稳,所以现阶段再眼花缭乱的功能,都只是看上去很美,用起来很废。不了解这一点,自动驾驶千万别乱用,对于车辆来说只是一个bug,对于你来说是一生,是一个家庭!

 一、自动驾驶的难点在哪?
一、自动驾驶的难点在哪?
 第11代奔驰S,搭载了激光雷达,5个毫米波雷达,12个超声波雷达还有7个摄像头。
第11代奔驰S,搭载了激光雷达,5个毫米波雷达,12个超声波雷达还有7个摄像头。
 小鹏P5,据说有2颗激光雷达,13个摄像头、5个毫米波雷达和12个超声波雷达。
小鹏P5,据说有2颗激光雷达,13个摄像头、5个毫米波雷达和12个超声波雷达。
 极狐阿尔法S HI版,3颗、96线车规级激光雷达,6个毫米波雷达,12个摄像头,13个超声波雷达,同时搭载算力可达352Tops的华为芯片。
极狐阿尔法S HI版,3颗、96线车规级激光雷达,6个毫米波雷达,12个摄像头,13个超声波雷达,同时搭载算力可达352Tops的华为芯片。

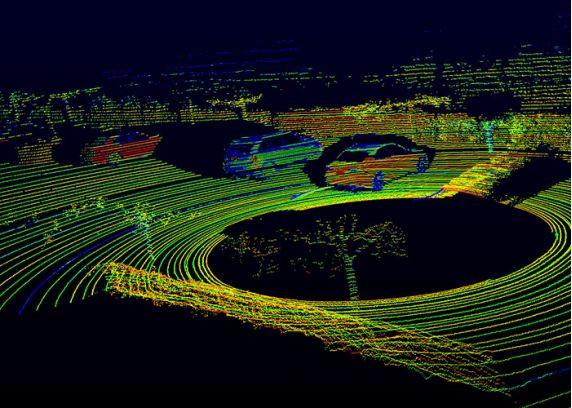
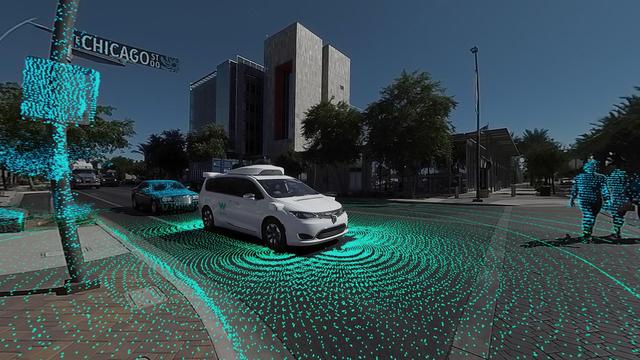
 是不是看起来很牛?其实这些激光雷达、毫米波雷达和超声波雷达,再加上高精度摄像头,也都只是自动驾驶里的“感知层”而已。在感知层方面,电脑的确可以优于人脑,毕竟人只有一双眼睛,相当于一对可变换角度的摄像头而已,耳朵作为弱化版的雷达,感知信息十分有限。现在感知层已经没什么问题了,可是要实现高精度的自动驾驶,感知远远不够。
是不是看起来很牛?其实这些激光雷达、毫米波雷达和超声波雷达,再加上高精度摄像头,也都只是自动驾驶里的“感知层”而已。在感知层方面,电脑的确可以优于人脑,毕竟人只有一双眼睛,相当于一对可变换角度的摄像头而已,耳朵作为弱化版的雷达,感知信息十分有限。现在感知层已经没什么问题了,可是要实现高精度的自动驾驶,感知远远不够。

 第二层叫决策层,把这些画面、雷达等信息加以分析处理,计算下一步的操作。决定它的是算法和芯片的算力。目前的难点是算法复杂,车机算力不够。难以实现冗余来保证安全。
什么是设计冗余呢?其实摄像头和雷达就是。特斯拉只用摄像头,就可以准确地识别周围的物体,而且精度很高。而激光雷达,更是直接可以绘制出周边环境的三维模型。这就是技术冗余,当摄像头受到影响的时候,雷达依然可以实现感知。而雷达信号受到干扰的时候,摄像头还能弥补。
有人说特斯拉取消雷达,依旧可以靠摄像头来实现高精度识别,技术真牛!这显然是无知的。实现功能和功能可靠是两回事,只用摄像头,可靠性肯定没有摄像头、雷达相互验证来得好。特斯拉此举只是为了降低成本,同时也是为了降低算力上的负担。要知道,让激光雷达建模,同时再去识别摄像头图像,两者再相互验证,对算力的消耗是惊人的,目前也算法上也没有完全攻克。
感知层解决了,但是决策层是难点。因为真正的自动驾驶不允许你出错!现在的决策层,受到算力和算法的限制,只能做到“差不多就行”。说安全还为时尚早。
第三层叫执行层,这才是自动驾驶的照妖镜。
简单说眼睛已经看到了前面有车,大脑已经做出了刹车避让的指令,执行层就是你脚踩下刹车,同时打轮避让。看似简单,可是这里面涉及到的东西可远比你想象的复杂。
举个简单例子,现在车企叫做汽车主机厂商——没错,主机,和电脑主机是一个意思。因为造车和攒机差不多。有自己的发动机、变速箱,这已经很了不起了,汽车多达上万种零部件,不可能所有东西都自己造。
就是前面的那种简单情况,执行层如何操作?为了获取最大制动力,你得让自家的发动机停止喷油,进入滑行工况,让爱信的变速箱降档提供最大的发动机制动,同时让博世的ibooster系统刹车,这里面还涉及到ABS、TCS系统的协作。感应到速度降低到一定程度后,得到反馈后让现代摩比斯的转向机提供转向,避让障碍……
想要实现上面的操作,你是不是得把这几家供应商的技术大佬都给归拢一堆,大家开个会啊?没错,供应商也都会给你留出接口,让你可以编程。ibooster就是如此。可是你买个变速箱都看调校呢,人家生产的东西,你确定调校的好?真要是出了事,是调校出了问题还是系统本身的问题?
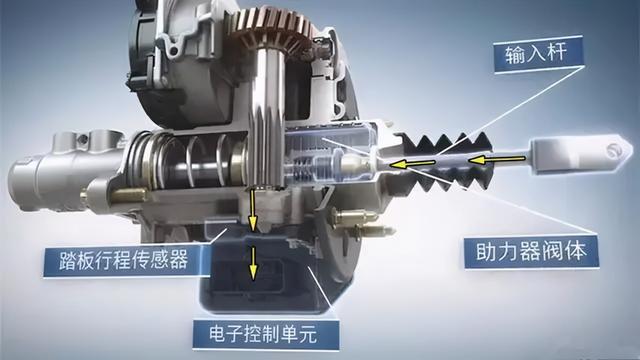
比如说博世的刹车系统,你脚踩刹车,那执行逻辑非常简单,感应器感应到刹车踏板移动了,产生电信号,命令ibooster提升缸压,提供刹车助力,你继续踩下去,在刹车助力的帮助下,卡钳夹紧刹车片提供制动力。
如果是混动车型,还要加上动能回收、还要ESP系统,相互之间协同要更加复杂,你让刹车命令在哪个逻辑层面上执行?看似一个简单的指令,你需要博世的刹车系统配合你——可是人家怎么和你配合?
博世的ibooster
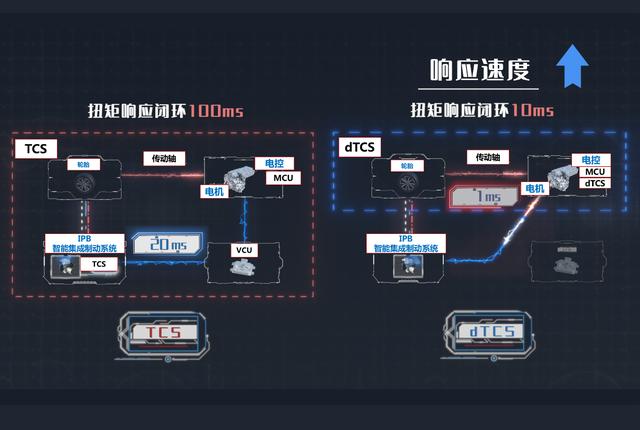
比亚迪和博世联合研发的dTCS系统,让牵引力控制系统的扭矩响应时间从100毫秒降低到了10毫秒,控制时间降低到了1毫秒。说是黑科技,其实也很简单,就是电脑的命令在终端实现了对接。原来是十个人报数来传达指令,现在排头还一句,排位直接听到之后就执行了。这个技术不关键,关键的是,为什么是比亚迪和博世联合研发的?因为这套dTCS系统,电控是比亚迪的,ESP(包括了原来的TCS牵引力控制系统的执行层)是博世的。他俩握手,才实现了这个黑科技。
记住,这只是电控和ESP的协同而已,自动驾驶要协同的东西有多少?转向机、刹车系统、电机、发动机和ECU都不是你自己的东西,就写个算法就叫自动驾驶了?搞不定这些东西,自动驾驶是永远不可能可靠的!
此前特斯拉的刹车失灵事件,很大概率就是博世的ibooster和特斯拉的电控(动能回收系统)发生了逻辑冲突导致的,在执行层面上,实现功能很容易,想要做到可靠,任重道远!或许,未来真正能最先实现可靠自动驾驶的,不是特斯拉,不是小鹏、华为,而是比亚迪、现代和丰田其中的一家。其中比亚迪最有希望,原因不是自动驾驶的技术,而是因为他们技术最全面,所有零部件都能自己造,也都有相关技术储备。
自动驾驶,成功一万次,一亿次都不值得炫耀,尤其是现在阶段,因为失败一次就是一生,就是一个家庭!自动驾驶不是像你想的那样,加个激光雷达,能准确感知周围就高枕无忧了,需要解决的难题太多了!关键是稳定性!
二、自动驾驶的分级和逻辑硬伤
首先咱们简单介绍一下自动驾驶级别的涵义:
L1:辅助驾驶,相对于L0级,完全人工驾驶而言,可以辅助驾驶,如自适应巡航、自动泊车等。
L2:定义为部分自动化,在ACC自适应巡航的基础上,实现车道保持、并线辅助、主动刹车甚至是自动超车等等。目前的自动驾驶都是L2,还是以辅助驾驶为主,说白了是减少人为操作负担,但是仍旧以人为主。
L3:条件自动化:技术上已经可以实现完全自动驾驶了,唯一的区别是,可靠性不能保证,所以人依旧得随时准备接管。
L4:高度自动化:基本上已经没人什么事了,出现问题的概率远小于人工驾驶,和L3的区别是出事了谁负责,L3还得驾驶员负责,L4已经由厂商负责了。
L5:完全自动化:人已经可以在后排睡觉了,甚至车可以自己出去开滴滴。和L4的区别在于L4是限场景的,比如说只能在熟悉的路段,只能在高速等等。
不知道大家发现没有,在L2和L3之间,并没有一个明确的分界线,L3在技术上已经无限接近L4了,唯一的问题是可靠性无法保证——你无法保证还全面接管,这就是个bug。
事要么你管,要么我管,如果大家都管的话,结果就是谁都无法负责!车也是如此,要么你开,要么我开,我开你就别哔哔!另外,所有会开车的人都会有这种感受:在路上,如果车水马龙,路况复杂,你需要时刻保持专注,反而不容易犯困走神儿。因为你脑子里那根线绷着呢!可是马路上没车,路况单一,一直是大直马路,这是最容易走神犯困的,因为你容易放下戒备!
L3级自动驾驶也是如此,它干了绝大部分工作,就只有在出错的时候交给你,那时候你能保证你还像自己开车的时候那么警惕吗?所以我个人的态度是,要么L2,明确就是辅助,要么就是L4,系统完全接管!出了事也厂商负责。L3并没有实际意义,反而成了厂商营销的噱头!不能保证安全的东西要你何用?
最后说一句,无下限鼓吹自动驾驶的车企,都是垃圾!
第二层叫决策层,把这些画面、雷达等信息加以分析处理,计算下一步的操作。决定它的是算法和芯片的算力。目前的难点是算法复杂,车机算力不够。难以实现冗余来保证安全。
什么是设计冗余呢?其实摄像头和雷达就是。特斯拉只用摄像头,就可以准确地识别周围的物体,而且精度很高。而激光雷达,更是直接可以绘制出周边环境的三维模型。这就是技术冗余,当摄像头受到影响的时候,雷达依然可以实现感知。而雷达信号受到干扰的时候,摄像头还能弥补。
有人说特斯拉取消雷达,依旧可以靠摄像头来实现高精度识别,技术真牛!这显然是无知的。实现功能和功能可靠是两回事,只用摄像头,可靠性肯定没有摄像头、雷达相互验证来得好。特斯拉此举只是为了降低成本,同时也是为了降低算力上的负担。要知道,让激光雷达建模,同时再去识别摄像头图像,两者再相互验证,对算力的消耗是惊人的,目前也算法上也没有完全攻克。
感知层解决了,但是决策层是难点。因为真正的自动驾驶不允许你出错!现在的决策层,受到算力和算法的限制,只能做到“差不多就行”。说安全还为时尚早。
第三层叫执行层,这才是自动驾驶的照妖镜。
简单说眼睛已经看到了前面有车,大脑已经做出了刹车避让的指令,执行层就是你脚踩下刹车,同时打轮避让。看似简单,可是这里面涉及到的东西可远比你想象的复杂。
举个简单例子,现在车企叫做汽车主机厂商——没错,主机,和电脑主机是一个意思。因为造车和攒机差不多。有自己的发动机、变速箱,这已经很了不起了,汽车多达上万种零部件,不可能所有东西都自己造。
就是前面的那种简单情况,执行层如何操作?为了获取最大制动力,你得让自家的发动机停止喷油,进入滑行工况,让爱信的变速箱降档提供最大的发动机制动,同时让博世的ibooster系统刹车,这里面还涉及到ABS、TCS系统的协作。感应到速度降低到一定程度后,得到反馈后让现代摩比斯的转向机提供转向,避让障碍……
想要实现上面的操作,你是不是得把这几家供应商的技术大佬都给归拢一堆,大家开个会啊?没错,供应商也都会给你留出接口,让你可以编程。ibooster就是如此。可是你买个变速箱都看调校呢,人家生产的东西,你确定调校的好?真要是出了事,是调校出了问题还是系统本身的问题?
比如说博世的刹车系统,你脚踩刹车,那执行逻辑非常简单,感应器感应到刹车踏板移动了,产生电信号,命令ibooster提升缸压,提供刹车助力,你继续踩下去,在刹车助力的帮助下,卡钳夹紧刹车片提供制动力。
如果是混动车型,还要加上动能回收、还要ESP系统,相互之间协同要更加复杂,你让刹车命令在哪个逻辑层面上执行?看似一个简单的指令,你需要博世的刹车系统配合你——可是人家怎么和你配合?
博世的ibooster
比亚迪和博世联合研发的dTCS系统,让牵引力控制系统的扭矩响应时间从100毫秒降低到了10毫秒,控制时间降低到了1毫秒。说是黑科技,其实也很简单,就是电脑的命令在终端实现了对接。原来是十个人报数来传达指令,现在排头还一句,排位直接听到之后就执行了。这个技术不关键,关键的是,为什么是比亚迪和博世联合研发的?因为这套dTCS系统,电控是比亚迪的,ESP(包括了原来的TCS牵引力控制系统的执行层)是博世的。他俩握手,才实现了这个黑科技。
记住,这只是电控和ESP的协同而已,自动驾驶要协同的东西有多少?转向机、刹车系统、电机、发动机和ECU都不是你自己的东西,就写个算法就叫自动驾驶了?搞不定这些东西,自动驾驶是永远不可能可靠的!
此前特斯拉的刹车失灵事件,很大概率就是博世的ibooster和特斯拉的电控(动能回收系统)发生了逻辑冲突导致的,在执行层面上,实现功能很容易,想要做到可靠,任重道远!或许,未来真正能最先实现可靠自动驾驶的,不是特斯拉,不是小鹏、华为,而是比亚迪、现代和丰田其中的一家。其中比亚迪最有希望,原因不是自动驾驶的技术,而是因为他们技术最全面,所有零部件都能自己造,也都有相关技术储备。
自动驾驶,成功一万次,一亿次都不值得炫耀,尤其是现在阶段,因为失败一次就是一生,就是一个家庭!自动驾驶不是像你想的那样,加个激光雷达,能准确感知周围就高枕无忧了,需要解决的难题太多了!关键是稳定性!
二、自动驾驶的分级和逻辑硬伤
首先咱们简单介绍一下自动驾驶级别的涵义:
L1:辅助驾驶,相对于L0级,完全人工驾驶而言,可以辅助驾驶,如自适应巡航、自动泊车等。
L2:定义为部分自动化,在ACC自适应巡航的基础上,实现车道保持、并线辅助、主动刹车甚至是自动超车等等。目前的自动驾驶都是L2,还是以辅助驾驶为主,说白了是减少人为操作负担,但是仍旧以人为主。
L3:条件自动化:技术上已经可以实现完全自动驾驶了,唯一的区别是,可靠性不能保证,所以人依旧得随时准备接管。
L4:高度自动化:基本上已经没人什么事了,出现问题的概率远小于人工驾驶,和L3的区别是出事了谁负责,L3还得驾驶员负责,L4已经由厂商负责了。
L5:完全自动化:人已经可以在后排睡觉了,甚至车可以自己出去开滴滴。和L4的区别在于L4是限场景的,比如说只能在熟悉的路段,只能在高速等等。
不知道大家发现没有,在L2和L3之间,并没有一个明确的分界线,L3在技术上已经无限接近L4了,唯一的问题是可靠性无法保证——你无法保证还全面接管,这就是个bug。
事要么你管,要么我管,如果大家都管的话,结果就是谁都无法负责!车也是如此,要么你开,要么我开,我开你就别哔哔!另外,所有会开车的人都会有这种感受:在路上,如果车水马龙,路况复杂,你需要时刻保持专注,反而不容易犯困走神儿。因为你脑子里那根线绷着呢!可是马路上没车,路况单一,一直是大直马路,这是最容易走神犯困的,因为你容易放下戒备!
L3级自动驾驶也是如此,它干了绝大部分工作,就只有在出错的时候交给你,那时候你能保证你还像自己开车的时候那么警惕吗?所以我个人的态度是,要么L2,明确就是辅助,要么就是L4,系统完全接管!出了事也厂商负责。L3并没有实际意义,反而成了厂商营销的噱头!不能保证安全的东西要你何用?
最后说一句,无下限鼓吹自动驾驶的车企,都是垃圾!




