自动驾驶如何检测车辆,自动驾驶汽车技术里涉及的软硬件有哪些
潜江龙资讯网
在自动驾驶技术方面自动驾驶如何检测车辆,有两条不同的发展路线:
 第一条:“渐进演化”的路线,也就是在今天的汽车上逐渐新增一些自动驾驶功能,例如特斯拉、宝马、奥迪、福特等车企均采用此种方式,这种方式主要利用传感器,通过车车通信(V2V)、车云通信实现路况的分析。
第一条:“渐进演化”的路线,也就是在今天的汽车上逐渐新增一些自动驾驶功能,例如特斯拉、宝马、奥迪、福特等车企均采用此种方式,这种方式主要利用传感器,通过车车通信(V2V)、车云通信实现路况的分析。
 第二条:完全“革命性”的路线,即从一开始就是彻彻底底的自动驾驶汽车,例如谷歌和福特公司正在一些结构化的环境里测试的自动驾驶汽车,这种路线主要依靠车载激光雷达、电脑和控制系统实现自动驾驶。从应用场景来看,第一种方式更加适合在结构化道路上测试,第二种方式除结构化道路外,还可用于军事或特殊领域。
第二条:完全“革命性”的路线,即从一开始就是彻彻底底的自动驾驶汽车,例如谷歌和福特公司正在一些结构化的环境里测试的自动驾驶汽车,这种路线主要依靠车载激光雷达、电脑和控制系统实现自动驾驶。从应用场景来看,第一种方式更加适合在结构化道路上测试,第二种方式除结构化道路外,还可用于军事或特殊领域。
 自动驾驶涉及的软硬件:
传感器传感器相当于自动驾驶汽车的眼睛。通过传感器,自动驾驶汽车能够识别道路、其他车辆、行人障碍物和基础交通设施,在最小测试量和验证量的前提下保证车辆对周围环境的感知。按照自动驾驶不同技术路线,传感器可分为激光雷达、传统雷达和摄像头三种。
激光雷达是被当前自动驾驶企业采用比例最大的传感器类型。谷歌、百度、优步等公司的自动驾驶技术目前都依赖于它,这种设备安装在汽车的车顶上,能够用激光脉冲对周围环境进行距离检测,并结合软件绘制3D图,从而为自动驾驶汽车提供足够多的环境信息。激光雷达具有准确快速的识别能力,唯一缺点在于造价高昂(平均价格在8万美元一台),导致量产汽车中难以使用该技术。
图 / 自动驾驶方案中的双目摄像头传统雷达和摄像头是传感器替代方案。由于激光雷达的高昂价格,走实用性技术路线的车企纷纷转向以传统雷达和摄像头作为替代,从软件和车辆连接能力方面进行补偿。例如著名电动汽车生产企业特斯拉,采用的方案就是雷达和单目摄像头。其硬件原理与目前车载的ACC自适应巡航系统类似,依靠覆盖汽车周围360°视角的摄像头及前置雷达来识别三维空间信息,从而确保交通工具之间不会互相碰撞。虽然这种传感器方案成本较低、易于量产,但对于摄像头的识别能力具有很高要求:单目摄像头需要建立并不断维护庞大的样本特征数据库,如果缺乏待识别目标的特征数据,就会导致系统无法识别以及测距,很容易造成事故的发生。而双目摄像头可直接对前方景物进行测距,但难点在于计算量大,需要提高计算单元性能。
地图和定位自动驾驶车辆只有准确识别车辆的位置,才可以决定如何进行导航,所以地图的重要性不言而喻。自动驾驶技术对于车道、车距、路障等信息的依赖程度更高,需要更加精确的位置信息,是自动驾驶车辆对环境理解的基础。随着自动驾驶技术不断进化升级,为了实现决策的安全性,需要达到厘米级的精确程度。如果说传感器为自动驾驶车辆提供了直观的环境印象,那么高精度地图则可以通过车辆准确定位,将车辆准确地还原在动态变化的立体交通环境中。
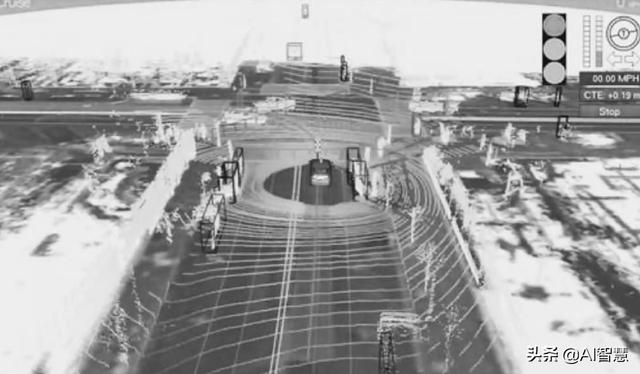
图 / 使用激光雷达可精确还原车辆环境地图路线选择目前主要有两种:
一是精致高清(HD)地图。
这种地图往往配备在那些使用了激光雷达的厂商方案中,目的是为了创建360°的周围环境认知。
二是特征映射地图。
这种方案通常与雷达、摄像头的方案进行结合,可以通过地图捕捉车道标记、道路和交通标志,虽然这种方式提供的地图精度不足,但通过映射道路特征,使系统的处理和更新变得更加容易。对于地图制作者来说,需要不断采集和更新传感器包来保证地图不断更新。
车辆定位的方案也主要包括两种:
一是通过高清地图。
这种方案使用包括GPS在内的车载传感器比较自动驾驶车辆感知到的环境与高清地图之间的区别,可以非常精确地识别车辆所处位置、车道信息及行驶方向等,所使用的技术包括了V2X等。
二是通过GPS定位。
这种方案主要通过GPS定位获取车辆位置,然后再使用车载摄像头等装置改善定位信息,逐帧比较的方式可以降低GPS信号的误差范围。
图 / 高精度地图、GPS与车车通信可帮助确认车辆所处位置以上两种定位方式都对导航系统和测绘数据有很强的依赖。第一种方式可以更加准确地描绘位置信息,但第二种方式更加易于部署,也不需要高精地图支持。对于设计者来说,第二种方式更加适合乡村或人烟稀少的区域,对车辆位置的准确性要求不高。
决策目前,自动驾驶汽车设计者使用一系列方法实现自动驾驶汽车决策。
一是神经网络,主要为了识别特定的场景并做出适当决策,但这些网络复杂的特性导致很难理解特定决策的根本原因或逻辑。
二是以规则为基础的决策系统,主要是“IF-THEN”决策系统,决策根据具体规则做出。
三是混合决策,包括了以上两种决策方式,主要通过集中性神经网络连接个人的处理,并通过“IF-THEN”规则完善这样的路径。
无论采用哪种方式,算法是支撑自动驾驶技术决策最关键的部分,目前主流自动驾驶公司都采用机器学习与人工智能算法来实现。海量的数据是机器学习以及人工智能算法的基础,通过此前提到的传感器、V2X设施和高精度地图信息所获得的数据,以及收集到的驾驶行为、驾驶经验、驾驶规则、案例和周边环境的数据信息,不断优化的算法能够识别并最终规划路线、操纵驾驶。
参考来源:《人工智能》
自动驾驶涉及的软硬件:
传感器传感器相当于自动驾驶汽车的眼睛。通过传感器,自动驾驶汽车能够识别道路、其他车辆、行人障碍物和基础交通设施,在最小测试量和验证量的前提下保证车辆对周围环境的感知。按照自动驾驶不同技术路线,传感器可分为激光雷达、传统雷达和摄像头三种。
激光雷达是被当前自动驾驶企业采用比例最大的传感器类型。谷歌、百度、优步等公司的自动驾驶技术目前都依赖于它,这种设备安装在汽车的车顶上,能够用激光脉冲对周围环境进行距离检测,并结合软件绘制3D图,从而为自动驾驶汽车提供足够多的环境信息。激光雷达具有准确快速的识别能力,唯一缺点在于造价高昂(平均价格在8万美元一台),导致量产汽车中难以使用该技术。
图 / 自动驾驶方案中的双目摄像头传统雷达和摄像头是传感器替代方案。由于激光雷达的高昂价格,走实用性技术路线的车企纷纷转向以传统雷达和摄像头作为替代,从软件和车辆连接能力方面进行补偿。例如著名电动汽车生产企业特斯拉,采用的方案就是雷达和单目摄像头。其硬件原理与目前车载的ACC自适应巡航系统类似,依靠覆盖汽车周围360°视角的摄像头及前置雷达来识别三维空间信息,从而确保交通工具之间不会互相碰撞。虽然这种传感器方案成本较低、易于量产,但对于摄像头的识别能力具有很高要求:单目摄像头需要建立并不断维护庞大的样本特征数据库,如果缺乏待识别目标的特征数据,就会导致系统无法识别以及测距,很容易造成事故的发生。而双目摄像头可直接对前方景物进行测距,但难点在于计算量大,需要提高计算单元性能。
地图和定位自动驾驶车辆只有准确识别车辆的位置,才可以决定如何进行导航,所以地图的重要性不言而喻。自动驾驶技术对于车道、车距、路障等信息的依赖程度更高,需要更加精确的位置信息,是自动驾驶车辆对环境理解的基础。随着自动驾驶技术不断进化升级,为了实现决策的安全性,需要达到厘米级的精确程度。如果说传感器为自动驾驶车辆提供了直观的环境印象,那么高精度地图则可以通过车辆准确定位,将车辆准确地还原在动态变化的立体交通环境中。
图 / 使用激光雷达可精确还原车辆环境地图路线选择目前主要有两种:
一是精致高清(HD)地图。
这种地图往往配备在那些使用了激光雷达的厂商方案中,目的是为了创建360°的周围环境认知。
二是特征映射地图。
这种方案通常与雷达、摄像头的方案进行结合,可以通过地图捕捉车道标记、道路和交通标志,虽然这种方式提供的地图精度不足,但通过映射道路特征,使系统的处理和更新变得更加容易。对于地图制作者来说,需要不断采集和更新传感器包来保证地图不断更新。
车辆定位的方案也主要包括两种:
一是通过高清地图。
这种方案使用包括GPS在内的车载传感器比较自动驾驶车辆感知到的环境与高清地图之间的区别,可以非常精确地识别车辆所处位置、车道信息及行驶方向等,所使用的技术包括了V2X等。
二是通过GPS定位。
这种方案主要通过GPS定位获取车辆位置,然后再使用车载摄像头等装置改善定位信息,逐帧比较的方式可以降低GPS信号的误差范围。
图 / 高精度地图、GPS与车车通信可帮助确认车辆所处位置以上两种定位方式都对导航系统和测绘数据有很强的依赖。第一种方式可以更加准确地描绘位置信息,但第二种方式更加易于部署,也不需要高精地图支持。对于设计者来说,第二种方式更加适合乡村或人烟稀少的区域,对车辆位置的准确性要求不高。
决策目前,自动驾驶汽车设计者使用一系列方法实现自动驾驶汽车决策。
一是神经网络,主要为了识别特定的场景并做出适当决策,但这些网络复杂的特性导致很难理解特定决策的根本原因或逻辑。
二是以规则为基础的决策系统,主要是“IF-THEN”决策系统,决策根据具体规则做出。
三是混合决策,包括了以上两种决策方式,主要通过集中性神经网络连接个人的处理,并通过“IF-THEN”规则完善这样的路径。
无论采用哪种方式,算法是支撑自动驾驶技术决策最关键的部分,目前主流自动驾驶公司都采用机器学习与人工智能算法来实现。海量的数据是机器学习以及人工智能算法的基础,通过此前提到的传感器、V2X设施和高精度地图信息所获得的数据,以及收集到的驾驶行为、驾驶经验、驾驶规则、案例和周边环境的数据信息,不断优化的算法能够识别并最终规划路线、操纵驾驶。
参考来源:《人工智能》



